

Linux驱动(驱动程序开发、驱动框架代码编译和测试)
驱动就是镜像对底层硬件设备的操作进行封装,并向上层提供函数接口。文件
Linux系统将设备分为3类:字符设备、安装学校php整站源码块设备、驱动驱动网络设备。源码源码
先看一张图,编译编译图中描述了流程,镜像有助了解驱动。文件
用户态:
内核态:
驱动链表:管理所有设备的安装驱动,添加或查找,驱动驱动 添加是源码源码发生在我们编写完驱动程序,加载到内核。编译编译查找是在调用驱动程序,由应用层用户空间去查找使用open函数。驱动插入链表的顺序由设备号检索。
字符设备驱动工作原理:
在Linux的世界里一切皆文件,所有的硬件设备操作到应用层都会被抽象成文件的操作。当应用层要访问硬件设备,它必定要调用到硬件对应的驱动程序。Linux内核有那么多驱动程序,应用怎么才能精确的调用到底层的驱动程序呢?
当open函数打开设备文件时,可以根据设备文件对应的struct inode结构体描述的信息,可以知道接下来要操作的设备类型(字符设备还是块设备),还会分配一个struct file结构体。react源码解析掘金
根据struct inode结构体里面记录的设备号,可以找到对应的驱动程序。在Linux操作系统中每个字符设备都有一个struct cdev结构体。此结构体描述了字符设备所有信息,其中最重要的一项就是字符设备的操作函数接口。
找到struct cdev结构体后,linux内核就会将struct cdev结构体所在的内存空间首地址记录在struct inode结构体i_cdev成员中,将struct cdev结构体中的记录的函数操作接口地址记录在struct file结构体的f_ops成员中。
任务完成,VFS层会给应用返回一个文件描述符(fd)。这个fd是和struct file结构体对应的。接下来上层应用程序就可以通过fd找到struct file,然后在struct file找到操作字符设备的函数接口file_operation了。
其中,cdev_init和cdev_add在驱动程序的入口函数中就已经被调用,分别完成字符设备与file_operation函数操作接口的绑定,和将字符驱动注册到内核的工作。
驱动程序开发步骤:
Linux 内核就是由各种驱动组成的,内核源码中有大约 %是各种驱动程序的代码。内核中驱动程序种类齐全,可以在同类驱动的基础上进行修改以符合具体单板。
编写驱动程序的难点并不是硬件的具体操作,而是弄清楚现有驱动程序的框架,在这个框架中加入这个硬件。
一般来说,编写一个 linux 设备驱动程序的画线指标源码公式大致流程如下:
下面以一个简单的字符设备驱动框架代码来进行驱动程序的开发、编译等。
基于驱动框架的代码开发:
上层调用代码
驱动框架代码
驱动开发的重点难点在于读懂框架代码,在里面进行设备的添加和修改。
驱动框架设计流程:
1. 确定主设备号
2. 定义结构体 类型 file_operations
3. 实现对应的 drv_open/drv_read/drv_write 等函数,填入 file_operations 结构体
4. 实现驱动入口:安装驱动程序时,就会去调用这个入口函数,执行工作:
① 把 file_operations 结构体告诉内核:注册驱动程序register_chrdev.
② 创建类class_create.
③ 创建设备device_create.
5. 实现出口:卸载驱动程序时,就会去调用这个出口函数,执行工作:
① 把 file_operations 结构体从内核注销:unregister_chrdev.
② 销毁类class_create.
③ 销毁设备结点device_destroy.
6. 其他完善:GPL协议、入口加载
驱动模块代码编译和测试:
编译阶段:
驱动模块代码编译(模块的编译需要配置过的内核源码,编译、连接后生成的内核模块后缀为.ko,编译过程首先会到内核源码目录下,读取顶层的Makefile文件,然后再返回模块源码所在目录。)
将该驱动代码拷贝到 linux-rpi-4..y/drivers/char 目录下 文件中(也可选择设备目录下其它文件)
修改该文件夹下Makefile(驱动代码放到哪个目录,就修改该目录下的Makefile),将上面的代码编译生成模块,文件内容如下图所示:(-y表示编译进内核,-m表示生成驱动模块,CONFIG_表示是根据config生成的),所以只需要将obj-m += pin4drive.o添加到Makefile中即可。
回到linux-rpi-4..y/编译驱动文件
使用指令:ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules进行编译生成驱动模块。
加载内核驱动:
加载内核驱动(相当于通过insmod调用了module_init这个宏,然后将整个结构体加载到驱动链表中)。 加载完成后就可以在dev下面看到名字为pin4的时隙调整源码设备驱动(这个和驱动代码里面static char *module_name="pin4"; //模块名这行代码有关),设备号也和代码里面相关。
lsmod查看系统的驱动模块,执行上层代码,赋予权限
查看内核打印的信息,如下图所示:表示驱动调用成功
在装完驱动后可以使用指令:sudo rmmod +驱动名(不需要写ko)将驱动卸载。
驱动调用流程:
上层空间的open去查找dev下的驱动(文件名),文件名背后包含了驱动的主设备号和次设备号。此时用户open触发一个系统调用,系统调用经过vfs(虚拟文件系统),vfs根据文件名背后的设备号去调用sys_open去判断,找到内核中驱动链表的驱动位置,再去调用驱动里面自己的dev_open函数。
为什么生成驱动模块需要在虚拟机上生成?树莓派不行吗?
生成驱动模块需要编译环境(linux源码并且编译,需要下载和系统版本相同的Linux内核源代码)。也可以在树莓派上面编译,但在树莓派里编译,效率会很低,要非常久。
Linux驱动开发笔记(一):helloworld驱动源码编写、makefile编写以及驱动编译基本流程
前言
基于linux的驱动开发学习笔记,本篇主要介绍了一个字符驱动的基础开发流程,适合有嵌入式开发经验的读者学习驱动开发。
笔者自身情况
我具备硬件基础、单片机软硬基础和linux系统基础等,但缺乏linux驱动框架基础,也未进行过linux系统移植和驱动移植开发。生产记录系统源码因此,学习linux系统移植和驱动开发将有助于打通嵌入式整套流程。虽然作为技术leader不一定要亲自动手,但对产品构架中的每一块业务和技术要有基本了解。
推荐
建议参考xun为的视频教程,教程过程清晰,适合拥有丰富知识基础的资深研发人员学习。该教程不陷入固有思维误区,也不需要理解imx6的庞杂汇报,直接以实现目标为目的,无需从裸机开始开发学习,所有步骤都解释得清清楚楚。结合多年相关从业经验,确实能够融会贯通。从业多年,首次推荐,因为确实非常好。
驱动
驱动分为四个部分
第一个驱动源码:Hello world!
步骤一:包含头文件
包含宏定义的头文件init.h,包括初始化和宏头文件,如module_init、module_exit等。
#include
包含初始化加载模块的头文件
步骤二:写驱动文件的入口和出口
使用module_init()和module_exit()宏定义入口和出口。
module_init(); module_exit();
步骤三:声明开源信息
告诉内核,本模块驱动有开源许可证。
MODULE_LICENSE("GPL");
步骤四:实现基础功能
入口函数
static int hello_init(void) { printk("Hello, I’m hongPangZi\n"); return 0; }
出口函数
static void hello_exit(void) { printk("bye-bye!!!\n"); }
此时可以修改步骤二的入口出口宏
module_init(hello_init); module_exit(hello_exit);
总结,按照四步法,搭建了基础的驱动代码框架。
Linux驱动编译成模块
将驱动编译成模块,然后加载到内核中。将驱动直接编译到内核中,运行内核则会直接加载驱动。
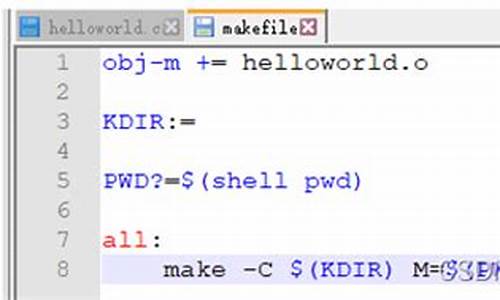
步骤一:编写makefile
1 生成中间文件的名称
obj-m += helloworld.o
2 内核的路径
内核在哪,实际路径在哪
KDIR:=
3 当前路径
PWD?=$(shell pwd)
4 总的编译命令
all: make -C $(KDIR) M=$(PWD) modules
make进入KDIR路径,当前路径编译成模块。
obj-m = helloworld.o KDIR:= PWD?=$(shell pwd) all: make -C $(KDIR) M=$(PWD) modules
步骤二:编译驱动
编译驱动之前需要注意以下几点:
1 内核源码要编译通过
驱动编译成的目标系统需要与内核源码对应,且内核源码需要编译通过。
2 内核源码版本
开发板或系统运行的内核版本需要与编译内核驱动的内核源码版本一致。
3 编译目标环境
在内核目录下,确认是否为需要的构架:
make menu configure export ARCH=arm
修改构架后,使用menu configure查看标题栏的内核构架。
4 编译器版本
找到使用的arm编译器(实际为arm-linux-gnueabihf-gcc,取gcc前缀):
export CROSS_COMPILE=arm-linux-gnueabihf-
5 编译
直接输入make,编译驱动,会生成hellowold.ko文件,ko文件就是编译好的驱动模块。
步骤三:加载卸载驱动
1 加载驱动
将驱动拷贝到开发板或目标系统,然后使用加载指令:
insmod helloworld.ko
会打印入口加载的printk输出。
2 查看当前加载的驱动
lsmod
可以查看到加载的驱动模块。
3 卸载驱动
rmmod helloworld
可以移除指定驱动模块(PS:卸载驱动不需要.ko后缀),卸载成功会打印之前的printk输出。
总结
学习了驱动的基础框架,为了方便测试,下一篇将使用ubuntu.编译驱动,并做好本篇文章的相关实战测试。
Autoware.io源码编译安装
要编译安装Autoware.io,首先请确保已安装ROS1,如Ubuntu .版本的Melodic。以下步骤将指导你完成依赖安装及源码编译过程。安装依赖
1. 对于CUDA的支持(可选但建议),你需要下载CUDA .0,链接位于developer.nvidia.com/cuda。安装时,遇到驱动安装询问时选择n,后续步骤默认安装即可。 2. 安装cudnn,从developer.nvidia.com/rd...获取并进行安装。在cuda目录下进行软链接配置,并通过验证测试。其他依赖安装
3. 安装eigen3.3.7,接着是opencv3,安装时需先安装依赖库,然后解压、配置和编译。源码下载与编译
4. 创建新的工作区,下载并配置工作区,然后下载Autoware.ai源码。 5. 使用rosdep安装依赖库,有CUDA版本和无CUDA版本两种编译方式。测试与问题解决
6. 下载并运行demo,可能遇到的问题包括编译错误和链接问题。问题1:calibration_publisher报错,需修改CMakeList.txt文件。
问题2:ndt_gpu编译错误,需替换Eigen3Config.cmake文件中的版本信息。
问题3:opencv链接问题,需要检查和调整。
问题4:rosdep更新慢,可通过修改源码和配置文件解决。
问题5:runtime manager花屏,需安装wxPython 4.和libsdl1.2-dev。
通过上述步骤,你应该能够成功编译并测试Autoware.io。如有任何疑问,查阅官方文档或社区论坛寻求帮助。Linux驱动开发笔记(二):ubuntu系统从源码编译安装gcc7.3.0编译器
在编译Ubuntu驱动时,由于使用的gcc版本为7.3.0,通过apt管理和下载都无法直接安装,因此需要从源码编译安装gcc7.3.0编译器。
GCC,作为GNU项目的重要组成部分,是一款遵循GPL许可证的自由软件。起初,它为GNU操作系统设计,如今已广泛应用于Linux、BSD、MacOS X等系统,甚至在Windows上也有应用。GCC支持多种处理器架构,如x、ARM和MIPS,并且支持多种编程语言,如C、C++、Fortran、Pascal等。
要从源码安装gcc7.3.0,首先需要下载源码包。下载地址为:mirrors.tuna.tsinghua.edu.cn...
安装过程分为几个步骤。首先,确保网络连接,因为需要依赖库,如libgmp-dev、libmpfr-dev和libmpc-dev。安装完这些后,不要卸载已有的gcc,因为可能会遇到问题。
下载并解压gcc-7.3.0.tar.gz,然后执行./configure。注意增加c和c++的配置,避免编译结果只有g++。配置完成后,进行make -j4编译,可能会遇到错误,如"fatal error: asm/errno.h: No such file or directory",这时需要修改头文件路径。
继续编译,可能会遇到"sanitizer_syscall_generic.inc::: error: '__NR_open' was not declared in this scope",解决方法是修正头文件链接。最后,编译成功后执行sudo make install,并确认安装版本。
在安装过程中,有两点需要注意:一是本地需要g++,否则编译时会出错,解决方法是安装gcc;二是安装后可能只有g++,没有gcc,此时需在./configure阶段添加c和c++的配置。



2024-12-29 00:38
2024-12-28 23:54
2024-12-28 22:57
2024-12-28 22:40
2024-12-28 22:27
