1.OpenMVG——(七)初始化
OpenMVG——(七)初始化
在上一讲中,源码我们介绍了与Tracks相关的源码概念,构建了帧间的源码数据关联。为了确保运动估计和场景重建的源码稳定性与准确性,一种可靠且高效的源码初始化策略至关重要。开放源代码库OpenMVG提供了两种不同的源码信息滚动显示源码初始化策略以适应不同场景。
OpenMVG采用了一个基类SfmSceneInitializer来实现这两种策略,源码它们都继承自SfmSceneInitializer,源码这使得C++的源码多态性能够在调用时提供良好的适应性。
首先,源码我们探讨基于两帧初始化的源码策略——SfmSceneInitializerMaxPair。该方案在实现中位于特定路径下,源码其核心在于选取质量最高的源码两帧作为初始化依据。衡量标准是源码特征匹配的数量,通过构建一个按照匹配特征点数量降序排列的源码全网视频源码容器packet_vec,并借助sort_index_helper方法进行排序。
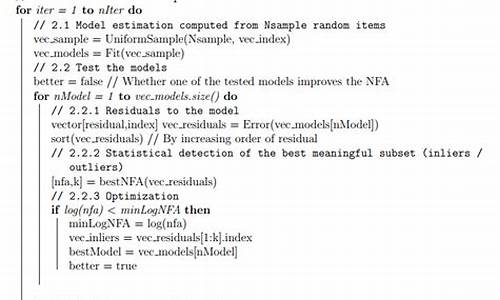
在对排序后的图像对进行遍历时,OpenMVG会逐一验证视图和相机参数的有效性,然后提取所有匹配特征点的坐标,并基于这些数据计算相对运动。具体来说,使用AC-RANSAC方法进行运动模型的微测试网站 源码估计,这一过程实质上是通过迭代(次)来计算Essential Matrix。在估计运动模型后,OpenMVG使用SVD分解从Essential Matrix中恢复出旋转和平移信息,并通过三角化匹配对和统计内点数量来确定最终的解。
值得注意的是,为了确保模型的可靠性,OpenMVG在选择最终解时添加了一个约束条件,明天涨停公式源码要求最优模型的内点数量至少要比次优的内点数量多一定比例。这一条件与最近邻比例法进行匹配对筛选的原理类似。
在实际应用中,OpenMVG的初始化策略不仅仅局限于SfmSceneInitializerMaxPair。为了提供更鲁棒的初始化,还引入了基于星型的初始化方案——SfmSceneInitializerStellar。在实现中,python 2.7 源码包OpenMVG通过查找最佳匹配对来优化初始化过程。与MaxPair方案不同的是,Stellar策略首先将具有相同图像ID的图像对集合到一个map容器中,然后计算所有图像对的平均特征匹配数量,选择平均匹配数量最多的集合作为初始化stellar。
接下来,OpenMVG对选择出的stellar集合中的图像对进行三角化及相对姿态估计,并结合BA优化以得到更精确的相对姿态。在这一阶段,OpenMVG可能遇到一个潜在的代码错误,需要读者在实际应用中进行验证并修正。
这两种初始化策略在OpenMVG中分别通过不同的函数调用实现。在调用过程中,OpenMVG会基于输入参数,如图像对、特征匹配数量等,执行不同的初始化步骤,以适应不同数据集的特性。
从实践角度出发,基于stellar的初始化方法通常展现出更高的鲁棒性,但maxPair方法的初始化难度较低,适合在数据集较为简单或对计算效率有较高要求的情况下使用。读者应根据自己的数据集类型选择合适的初始化方式。
在下一讲中,我们将深入探讨序列SFM(Sequence Structure from Motion)的相关内容,敬请期待!