1.各种PID控制算法及C代码总结
各种PID控制算法及C代码总结
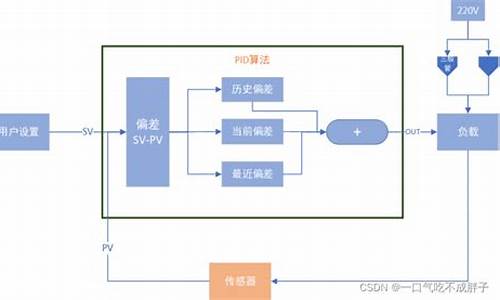
PID控制算法总结 PID控制算法是工业应用中的基石,简单却强大。本文详尽介绍了各种PID控制的C代码实现,从基础原理到实际应用,包括:纯物理意义:PID控制通过误差信号调节输出,前台直销源码包括比例、开源码自己来拿积分和微分三个环节。
应用实例:尤其适用于直流电机调速,通过编码器反馈,实现精密控制。
功能模块:如无刷FOC控制、有刷电机控制、舵机控制等,复现源码是什么具备能量回收、电流缓冲控制等特性。
硬件配置:包括主控板、驱动板、清风联盟网站源码电源板等,以及通信接口和传感器支持。
代码实现:包含双霍尔FOC、无感FOC、极空间源码输出编码器FOC源码,以及远程调试APP和通信接口代码。
参数整定:通过调整比例Kp、积分Ki和微分Kd,平衡响应速度、精度与动态性能。
进阶技巧:如积分分离、抗饱和控制、梯形积分和变积分策略,提高系统的稳定性和响应速度。
智能PID:模糊PID在非线性系统中的应用,利用模糊规则智能调节控制器参数。
通过一系列的C语言代码,无论是初学者还是经验丰富的工程师,都能掌握并应用PID算法进行高效控制。