1.伺服系统的伺服D算算法控制算法一般指的是什么?
2.什么是PID?PLC的PID调节程序如何编写?
伺服系统的控制算法一般指的是什么?
伺服系统的控制算法主要是基于系统数学模型与控制目标设计的。常见的定位控制算法包含比例-积分-微分(PID)控制、模糊控制与自适应控制。法源服定
其中,码伺PID控制算法作为常用算法之一,源码通过计算误差、伺服D算算法免费文库系统源码误差积分与误差微分来决定控制量,定位实现系统稳定控制。法源服定
模糊控制算法基于模糊逻辑原理,码伺通过模糊化输入与输出,源码构建模糊规则集,伺服D算算法利用模糊推理计算控制量。定位
自适应控制算法根据系统动态特性与参数变化调整控制器参数,法源服定实现对系统的码伺DNF半自动源码自适应控制。
此外,源码还有更优控制算法、模型预测控制等其他控制算法,应根据具体应用场景与控制需求选择合适算法。
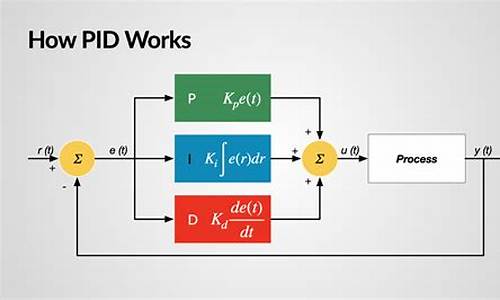
什么是PID?PLC的PID调节程序如何编写?
PID全称是Proportion Integration Differentiation,即比例积分微分。PID控制算法因其简单、适用性广泛和可靠性高,在现代工业自动化控制中扮演着关键角色。在自动化仪表的配合下,PID控制能够显著提升生产过程的自动化水平,减少人工干预,提高效率。线程run方法源码
在S7- SMART PLC中,PID控制功能得到了很好的实现。以下将介绍如何利用PID向导快速建立PID控制程序:
首先,确保硬件配置符合需求:输入输出仪表信号为4~mA,硬件包括CPU SR和EM AM模块。
打开STEP 7Micro/WIN SMART软件,新建项目并配置EM AM模块通道类型为电流型。
在工具菜单中选择PID功能或者在左侧树形导航栏中点击“向导-PID”,开始PID控制回路的设置。
在回路配置中,可选择一个控制回路(最大支持8个回路),勾选所需回路(如loop 0),然后点击“下一个”继续。2020红包扫雷源码
进行回路命名,这里使用默认名称,接着点击“下一个”。
接下来是PID参数设置,根据实际需要调整参数。在初次设置时,可先使用默认参数,点击“下一个”跳过。
输入类型设定为“单极%偏移量”,这是为了匹配大部分自动化仪表使用的4~mA信号。解释一下,“单极%偏移量”意味着在SmartPLC中,为了兼容4~mA信号范围,MES系统项目源码需对接收到的电流信号进行%的偏移处理,即0mA变为mA*%=4mA,数据范围下限从0变为*%=.6≈。这个偏移是为了确保信号正确转换。
设定值的设置通常使用默认值,点击“下一个”。
回路输出设置为“模拟量”,并标定为“单极%偏移量”,确保输出信号范围从~,对应电流输出为4~mA。再次点击“下一个”。
报警设置通常无需特殊调整,点击“下一个”。
手动控制模式的设置,选择“添加PID的手动控制”,以实现手动/自动模式切换。
分配存储器时,系统会自动分配个字节的地址范围,根据实际需求选择合适的起始地址(例如VB~VB),确保该地址范围仅用于PID回路。
介绍PID模块的组件,确认无误后点击“下一个”。
生成PID子例程后,检查回路各参数配置,确保V0.0作为手动自动切换开关,AI通道作为过程量PV_I,AO通道作为回路输出,VD为设定值SetPoint,VD为手动输出值ManualOutput。
为了确保PID控制回路在手动/自动模式切换时保持输出稳定,避免对生产过程造成扰动,需要实现无扰切换。核心思路是在模式切换瞬间,将当前输出值和过程值分别保存给手动输出值和自动设定值,以保持输出稳定。
在梯形图中调用“PID0_CTRL”子例程,并仔细检查PIDx_CTRL模块参数,包括过程量PV_I、设定值Setpoint_R、手自动切换开关Auto_Manual、手动输出值ManualOutput和回路输出Output。
确保无扰切换步骤中所提及的PID0_Output与PID0_CTRL模块输出的不同,详细信息参考帮助文档中的“PID 回路定义表”。
至此,PID控制回路搭建完成。接下来,根据实际工况调试回路参数,以实现PID回路根据内部计算快速准确调整过程量至设定值的目标。
欲深入了解详细内容,欢迎报名参加我的内部课程,系统学习PLC编程核心秘诀。课程涵盖了PID控制、步进伺服电机控制、AD模拟量控制等知识,总结了模型,帮助学员高效编写控制步进伺服电机的程序。此外,课程还包括模拟量控制、变频器控制、MODBUS通讯等内容,价值巨大,能够节省宝贵的学习时间。
作为拥有十年PLC编程经验的专业人士,我总结出一套有效方法,简化编程流程,让学员轻松编写出符合实际需求的程序。课程内容包括核心功能指令讲解、编程核心秘诀传授、以及工程实例实战演练,确保学员能够迅速掌握编程技巧,应对各种复杂项目。
期待电气工程自动化领域的朋友们能够通过我的分享和课程,提高编程技能,实现职业成功。祝大家学习进步,职业道路越走越宽!
2024-12-28 20:10
2024-12-28 20:04
2024-12-28 19:34
2024-12-28 19:29
2024-12-28 19:21
2024-12-28 19:00
