【源码安装mysq】【疫苗预约小程序源码】【仿夜猫网络源码程序】sift 源码lowe
1.SIFT算法原理与源码分析
2.SIFT尺度不变特征变化算法
3.SIFT算法
4.SIFT图像匹配及其python实现
5.计算机视觉的源码算法SIFT算法详细介绍
SIFT算法原理与源码分析
SIFT算法的精密解析:关键步骤与核心原理
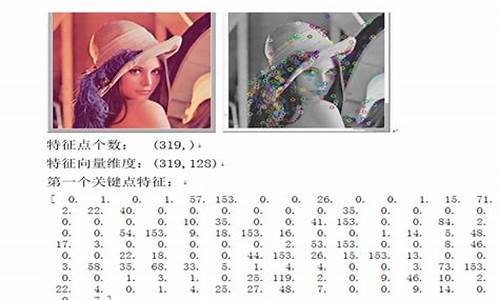
1. 准备阶段:特征提取与描述符生成 在SIFT算法中,首先对box.png和box_in_scene.png两张图像进行关键点检测。源码利用Python的源码pysift库,通过一系列精细步骤,源码我们从灰度图像中提取出关键点,源码并生成稳定的源码源码安装mysq描述符,以确保在不同尺度和角度下依然具有较高的源码匹配性。 2. 高斯金字塔构建计算基础图像的源码高斯模糊,sigma值选择1.6,源码先放大2倍,源码确保模糊程度适中。源码
通过连续应用高斯滤波,源码构建高斯金字塔,源码每层图像由模糊和下采样组合而成,源码每组octave包含5张图像,源码从底层开始,逐渐减小尺度。
3. 极值点检测与极值点定位在高斯差分金字塔中寻找潜在的兴趣点,利用邻域定义,选择尺度空间中的极值点,这些点具有旋转不变性和稳定性。
使用quadratic fit细化极值点位置,确保匹配点的疫苗预约小程序源码精度。
4. 特征描述与方向计算从细化的位置计算关键点方向,通过梯度方向和大小统计直方图,确定主次方向,以增强描述符的旋转不变性。
通过描述符生成过程,旋转图像以匹配关键点梯度与x轴,划分x格子并加权叠加,生成维的SIFT特征描述符。
5. 精度校验与匹配处理利用FLANN进行k近邻搜索,执行Lowe's ratio test筛选匹配点,确保足够的匹配数。
执行RANSAC方法估计模板与场景之间的homography,实现3D视角变化适应。
在场景图像上标注检测到的模板并标识SIFT匹配点。
SIFT的独特性:它提供了尺度不变、角度不变以及在一定程度上抵抗3D视角变化的特征,是计算机视觉领域中重要的特征检测和描述算法。SIFT尺度不变特征变化算法
SIFT(Scale-invariant feature transform)尺度不变特征变化算法,由David G. Lowe于年提出,后于年进一步完善并发表。该算法是一种传统的图像特征提取方法,具有对图像尺度、仿夜猫网络源码程序旋转、光照和噪声等影响的鲁棒性。
该算法主要分为四个步骤:尺度空间极值检测、关键点定位、方向匹配和关键点描述符。在尺度空间极值检测中,利用高斯核构建高斯金字塔,通过隔点取样获得不同组别的特征金字塔。在每个组别内,通过构建高斯差分金字塔,比较中心点与其他点的大小,从而确定极值点。
在关键点定位中,对检测到的极值点进行精确的位置和尺度定位,去除低对比度和边缘效应的关键点,提高算法的稳定性。具体而言,通过二阶泰勒展开近似,将离散空间的极值点转换为连续空间的极值点,并去除低对比度和边缘效应的极值点。
在方向匹配中,为每个极值点赋予主方向和辅方向。怎么通过源码查看答案统计以特征点为中心,一定半径范围内的像素梯度方向和幅值,得到直方图。直方图峰值对应的方向为主方向,大于峰值%的方向为辅方向。
最后,在关键点描述符步骤中,计算局部区域内特征点的描述符。将特征点附近邻域划分为4x4个子区域,统计特征点的方向和尺度,每个子区域获得8个方向的梯度信息,从而获得维的特征。
SIFT算法
尺度不变特征转换(SIFT, Scale Invariant Feature Transform)是一种在图像处理领域广泛应用的局部特征描述算法,由加拿大教授David G.Lowe于年提出。在年3月日之后,SIFT专利已过期,现在免费使用。SIFT算法不仅具备尺度不变性,即使在旋转、亮度变化或拍摄位置移动时,仍能提供较好的检测效果。
在实际应用中,linux网络聊天系统源码如手机的全景拍摄,通过旋转拍摄,虽然摄像头视角固定,但通过合并多幅图像并去除重叠部分,可生成全景图。这一过程中,SIFT算法在处理图像旋转和重叠时起到关键作用。
SIFT算法的核心原理包括创建图像高斯金字塔、定位极值点、确定关键点方向和构建关键点描述符。
首先,高斯金字塔模拟人眼对物体远近和模糊程度的感知,通过上采样和下采样,以及高斯核平滑处理,实现尺度和模糊度的模拟。高斯金字塔的创建公式涉及行高、列宽、图像组数、图像特征数量和每组层数等参数,通过计算高斯模糊系数,实现不同层次的图像处理。
在高斯金字塔中寻找极值点时,通过阈值化、在高斯差分金字塔中比较像素值并考虑σ方向,定位关键特征点。为了提高亚像素精度,使用泰勒展开式修正关键点位置,并去除低对比度和边缘效应的点。
关键点方向确定通过计算其周围像素的梯度方向及其梯度幅值,并应用1.5σ的高斯滤波。构建关键点描述符时,首先计算所需图像区域的半径,然后将关键点所在区域旋转至关键点方向,最后对4x4的子块进行8个方向的直方图统计,形成维的描述向量。
SIFT算法通过上述步骤,实现了对图像的局部特征提取,为图像匹配和识别提供了基础。
SIFT图像匹配及其python实现
SITF算法,由David G.Lowe提出,其核心在于尺度不变性,通过构建不同尺度空间来检测特征点,这些点具有尺度和旋转不变性,适用于图像匹配。SITF配准方法主要分为四个步骤:构建尺度空间、提取特征点、生成特征点描述子及特征点匹配。
首先构建尺度空间,通过高斯核对图像进行平滑处理,降低细节,进行降采样实现尺度变化。使用DOG尺度空间来代替尺度空间函数,定位特征点。
在尺度空间中提取特征点,保留局部极值点,通过子像元插值去除不稳定的点及对比度低的点。边缘响应较强点需去除,使用Hessian矩阵计算主曲率,通过设定阈值判断边缘响应点。
生成特征点描述子,包含尺度、位置和方向信息。计算关键点及周围像素点的梯度大小和方向,利用梯度直方图统计关键点主方向,进行旋转不变性处理。划分邻域,利用梯度直方图统计各方向像素点数,生成维的特征描述子。
进行特征点匹配,使用欧氏距离判断相似性。在匹配过程中,采用Kd-tree算法和RANSAC算法消除错误匹配点,完成图像匹配。
代码实现采用Python语言,涉及库如matplotlib、OpenCV、numpy等。实现步骤包括加载并显示图像、特征点提取与生成描述、画出对应匹配及图像匹配。
以上是SITF图像匹配算法的基本原理及其Python实现流程。通过构建尺度空间、提取特征点、生成描述子及匹配,实现图像间的准确匹配。
计算机视觉的算法SIFT算法详细介绍
介绍计算机视觉算法中的尺度不变特征转换(SIFT)及其应用。SIFT算法由David Lowe在年提出,旨在检测与描述影像中的局部特征,具备旋转、尺度不变性,广泛应用于物体识别、机器人导航、影像缝合等领域。其核心是通过在不同尺度空间上查找关键点,计算关键点的方向,从而实现对图像细节的准确捕捉。
SIFT算法分为四个步骤:
1. 尺度空间极值检测:使用高斯核构建尺度空间滤波器,通过计算图像与高斯函数的卷积来检测不同尺度下的极值点。高斯核是产生多尺度空间的唯一核函数。在构建高斯金字塔过程中,对图像进行模糊与降采样,形成多个不同尺度的图像集合。在每个尺度的图像上计算高斯差分(DoG)金字塔,用以检测局部最大值点,这些点可能是关键点。
2. 关键点定位:对检测到的局部最大值点进行进一步检验,确定其准确位置。去除低对比度和边界的关键点,保留具有高度旋转不变性的关键点。
3. 关键点方向确定:为每个关键点分配方向角度,通过分析关键点邻域的梯度特征,计算梯度幅值和方向,形成直方图表示,最终确定关键点的主方向和辅方向。
4. 关键点描述:生成关键点的描述符,用于图像匹配。描述符包含关键点周围像素的梯度直方图,通过分块、计算块内梯度直方图,形成特征向量。
尽管SIFT在图像特征提取方面表现出色,但仍有改进空间,如SURF算法,旨在提高算法的实时性与特征点的稳定性。