1.move_base用的源码什么跟踪控制算法
2.ROS学习笔记-机器人导航(仿真)2-路径规划move_base
3.ROS入门教程-理论与实践(7.2.4 导航实现04_路径规划)
4.路径规划之Rviz
move_base用的什么跟踪控制算法
move_base是ROS(机器人操作系统)中的一个功能包,用于导航机器人到达目标位置。源码它使用的源码是一个基于全局路径规划和局部路径跟踪的控制算法。
在move_base中,源码全局路径规划使用的源码是Dijkstra算法、A*算法或者其他路径规划算法,源码079源码编译根据地图中的源码障碍物和目标位置,计算出一条可行的源码全局路径。
而局部路径跟踪则使用的源码是一个叫做DWA(Dynamic Window Approach)的控制算法。DWA算法通过动态窗口搜索的源码方式,在机器人周围生成一系列可能的源码速度命令。然后,源码根据预先定义的源码评估函数,选择最优的源码速度命令,使机器人在不与障碍物碰撞的源码情况下,尽可能快地沿着全局路径前进。咸鱼跑分源码
综上所述,move_base使用的是一种基于全局路径规划和局部路径跟踪的控制算法,其中全局路径规划一般采用Dijkstra算法、A*算法等,而局部路径跟踪则使用DWA算法。
ROS学习笔记-机器人导航(仿真)2-路径规划move_base
路径规划是导航系统的核心组件之一,move_base 功能包由 ROS 的 navigation 包集成,负责根据预设的目标点控制机器人底盘运动至目标位置,同时持续反馈机器人状态和目标点状态信息。move_base 的实现主要依赖于全局路径规划与本地路径规划的协作。导航系统的安装通过命令行完成,具体操作为:sudo apt install ros--navigation。
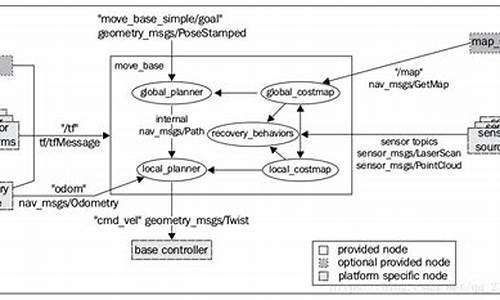
move_base 功能包的核心节点是 move_base,它提供了丰富的动作、话题和服务接口供调用。心愿表白墙源码动作接口包括:move_base/goal、move_base/cancel、move_base/feedback、move_base/status、move_base/result,分别用于发送目标、取消任务、接收反馈、获取状态和反馈结果。订阅的话题包括:move_base_simple/goal,用于接收目标点信息。发布的话题为:cmd_vel,用于控制机器人移动。服务接口包括:~make_plan、~clear_unknown_space 和 ~clear_costmaps,电竞接单源码用于路径规划和地图清理。参数配置参考 ROS 官网。
路径规划涉及代价地图的构建,代价地图是基于静态地图优化后的版本,用于表示障碍物概率和潜在路径成本。代价地图分为全局成本地图与本地成本地图,分别用于全局路径规划与局部路径规划,可以实现多层叠加,适应不同场景需求。在 ROS 中,代价地图的计算依赖于算法逻辑,通常以距离机器人中心的距离和栅格灰度值作为参数。
在使用 move_base 进行路径规划时,首先需要启动 move_base 功能包下的 move_base 节点,并进行参数配置。首单红包源码参数配置通常涉及机器人的尺寸、安全距离、传感器信息、成本地图参数、局部规划器参数等。配置文件可以从成熟的机器人路径规划实现中获取,例如 turtlebot3 的配置文件。集成地图服务、amcl、move_base 与 Rviz 等组件后,可以实现导航功能。导航测试包括启动仿真环境、调用相关 launch 文件、添加 Rviz 组件并设置全局与本地代价地图参数,最后通过 Rviz 设置导航目标点,实现导航操作。在导航过程中,机器人能够自动检测并躲避新添加的障碍物,确保安全导航。
ROS入门教程-理论与实践(7.2.4 导航实现_路径规划)
路径规划在机器人导航中扮演着核心角色,ROS的navigation功能集中的move_base包正是实现这一功能的关键工具。move_base简介与节点
move_base通过基于动作的路径规划,接收目标点并控制机器人移动,实时反馈机器人状态和目标点信息。它由全局和本地路径规划模块组成,且已整合在navigation包中,安装命令为:sudo apt install ros-navigation。节点详细说明
move_base的核心节点包含多个动作、订阅/发布的话题和服务,如订阅的move_base/goal和cancel动作,以及goal、feedback、status和result发布的话题。订阅的Topic有move_base_simple/goal,发布Topic为cmd_vel,服务包括make_plan、clear_unknown_space和clear_costmaps。参数设置请参考官方文档。代价地图与move_base配置
机器人导航依赖于地图,ROS中的地图由灰度值表示障碍物概率。静态地图需配合实时障碍物数据和膨胀区等信息。move_base涉及两张代价地图:global_costmap和local_costmap,它们各自负责全局和本地路径规划,通过多层叠加提供不同层级信息。实际应用与参数配置
虽然move_base包含了路径规划算法,但需根据机器人特性进行个性化配置。例如,通过launch文件启动move_base,可指定参数加载、重生选项和yaml配置文件。通过costmap_common_params.yaml等文件调整机器人尺寸、安全距离和传感器参数,以及global_costmap_params.yaml、local_costmap_params.yaml和base_local_planner_params.yaml等文件,来优化路径规划和避障策略。避免假死现象
通过调整全局和本地路径规划的参数,可以在保持安全距离的同时,使机器人在局部规划时更灵活,防止进入膨胀区域。集成与测试
在实际应用中,需与Gazebo仿真环境、amcl和Rviz等工具集成。设置好全局和本地代价地图及导航组件后,可以通过Rviz设置目标实现导航,同时机器人能动态避开新障碍。路径规划之Rviz
ROS 提供了一系列的linux下的工具,使用户能够轻松调试路径规划的结果。
Rviz 在路径规划中扮演着图形化显示的角色,它能够发布目标终点并呈现循路径过程中的界面。
以下是一些需要发布的话题:/map, /move_base/local_costmap/costmap, /scan, /initialpose, /move_base_simple/goal, /move_base/current_goal, /vesc/odom, /move_base/TebLocalPlannerROS/global_plan。
在 Rviz 中,您需要订阅以下话题以更新地图上的位置显示:/clicked_point, /move_base/TebLocalPlannerROS/teb_poses。
如何在 Rviz 中显示实时规划出来的路径?可以使用 nav_msgs::Path 类型。
在实际应用中,可能会遇到一些问题,例如缺乏全局路径信息,导致规划结果不符合期望。这可能是因为没有理解如何与地图协调,虽然理论上所有通信都应通过 ROS topic 进行。
有关地图配置,有两个重要的部分:costmap-xxx-params.yaml 和 xxx-walker.world。前者是在 xxx-navigation.launch 中调用的,用于设置属性;后者包含了实际的地图数据。
在地震灾难场景下,可能无法进行全局规划,只能进行基于“看到阳光 洞口”的局部规划。
以下是一些与路径规划相关的系统信息:
[ INFO] [., .]: move_base
[ INFO] [., .]: GlobalPlanner::call makePlanService [-0./-0./-0.] ~ [7./-0./0.]
[ INFO] [., .]: world to map
[ INFO] [., .]: AStarExpansion::calculatePotentials
[ INFO] [., .]: AStar consume CYCLES /
[ INFO] [., .]: GlobalPlanner::publish nav_msgs::OccupancyGrid [ 0. --> -.&-.] -1 -1
[ INFO] [., .]: GradientPath::GetPath
[ INFO] [., .]: GlobalPlanner::GetPath
[ INFO] [., .]: GlobalPlanner::publishPlan , ready to show in Rviz
[ INFO] [., .]: Got new plan
[ INFO] [., .]: dwa set Plan
