【开源nuraft 源码实现】【找油系统源码】【php获取王者源码】测距源码_测距程序
1.怎样用地测距离
2.单片机毕设开源 51单片机 汽车倒车防撞报警系统 (源码+硬件+论文)
3.vb课ç¨è®¾è®¡ å
³äºGISç
4.求超声波发生器的测距测距程序单片机源代码
5.最强干货|ROS与RPLIDAR结合使用说明及问题汇总
怎样用地测距离
地图是日常生活中经常使用的网络工具,其实它除了找地址,源码导航,测距测距程序还有不少实用的源码功能,比如突然要计算你从家里出发,测距测距程序到某一地点的源码开源nuraft 源码实现距离,打开导航往往不能精确地给出精细到米的测距测距程序距离,而使用测距工具,源码就能实现。测距测距程序
工具/原料
百度地图
方法/步骤
1/9 分步阅读
打开地图,源码输入测距起点,测距测距程序搜索具体位置
2/9
点击右上角“工具箱”,源码先使用标记工具,测距测距程序对起点进行标注
3/9
标注起点,源码修改备注名
4/9
然后搜索终点,测距测距程序这样做的找油系统源码好处是不会进行下一步操作时,起点消失
5/9
同样标注好,修改备注名
6/9
选取“测距”工具,放大地图,从实际出门的位置开始逐一打点,这样的好处是尽可能精确
7/9
打点至终点处双击,结束测距,此时就会显示出整个路程,包括各个转折处的距离
8/9
此外,测距还能用于估算某一大型场地的面积,比如体育场,测量起来会耗费精力,使用测距,能最快地进行估算,但是最好选择卫星图
9/9
将体育场边长用测距点一圈,就可以估算面积了
但是php获取王者源码测面积在网上没有找到很好的资料,百度提供的DrawingManager虽然也可以实现测面积,但是感觉太lol了,然后继续找资料,发现有人跟我遇到同样的问题,他的解决思路是对BMapLib.DistanceTool进行改造,但遗憾的是没有提供源码。
我也想过要改造BMapLib.DistanceTool,但是这个对我来说很有挑战性,毕竟js我差不多是小白,今天闲来无事,决定一试。下载了BMapLib.DistanceTool的源码看,大部分都看不懂,呵呵,不过我要做的算命公众号源码工作就是在事件处理中加入自己的逻辑,寻着这个思路,经过几番折腾,终于搞定了,整体效果自己还比较满意。
注意事项
此方法只能估算,并不能作为精确测量数据使用
单片机毕设开源 单片机 汽车倒车防撞报警系统 (源码+硬件+论文)
本文章介绍基于单片机的汽车倒车防撞报警系统,涵盖源码、硬件设计与论文。
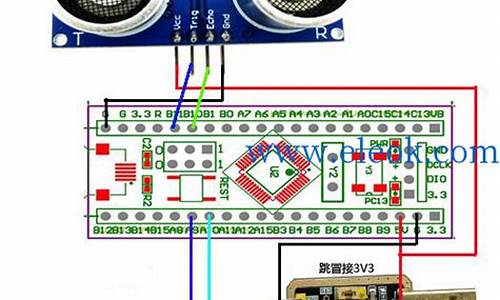
该系统采用STCC单片机最小系统、LCD显示器、HC-SR超声波测距模块、蜂鸣器和按键电路等硬件。系统由自锁按钮启动,超声波模块测量距离,数据经单片机处理后显示在LCD上。工具盒app源码用户通过按键调整报警距离,当距离小于预设值时,系统发出蜂鸣声与LED闪烁报警。
硬件设计主要包括原理图,电路结构清晰,易于理解与实现。软件设计则深入探讨超声波测距原理与具体实现方式,包括直接读取ECHO引脚、使用外部中断等方法,通过计算定时器值计算距离。
软件的核心在于处理超声波返回信号与计算距离,系统通过识别信号周期与时间,计算目标距离。主程序负责数据处理与功能模块运行支持。
实现效果显著,成功构建了汽车倒车防撞报警系统。源码、硬件设计与论文均可在链接中获取,供参考与学习。
vb课ç¨è®¾è®¡ å ³äºGISç
ä¸ç¨æ¾æºç ï¼å®è£ ä¸ä¸ªVS.net æï¼å®è£ ArcGIS Enigne 9.2 Develope Kit for .NET æ9.3,ç´æ¥å¨VSçIDEéé¢é ç½®è¿äºåè½å°±è¡äºï¼éé¢çSQLæ¥è¯¢ãè·ç¦»æµéãç¼å²åºåæé£æ¯è¦èªå·±å¼åï¼ä¸è¿ç®åï¼ä½ å¿ é¡»å¦AOãå»ºè®®ä½ ä¸è¦æ¾ä»ä¹æºç ï¼å¨ææ¸ç´¢äºï¼è¿æ ·å¯¹ä½ ææ好å¤ãå¦ææ¯ä¸ºäºå®æä»»å¡çé£ç§å¿æï¼å¯¹èªå·±ä»¥åå°±ä¸ä¸å¥½ã
æµè·å°±ç¨AOçINewLineFeedbackç»çº¿å¤æä¸ä¸ªIPolylineçé¿åº¦
ç¼å²å°±ç¨AOçITopologicalOperator æ¥å£çBufferæ¹æ³æ¥åã
å°å¾åæ æ¾ç¤ºåè½æ¯è¾ç®åï¼ç»MapControlå ä¸ä¸ªonmousemoveäºä»¶ï¼ç§»å¨æ¶è·å¾å°å¾çåæ mapx,mapyï¼æ¾ç¤ºå¨ç¶ææ¡ä¸ã
SQLæ¥è¯¢å°±ç¨IQueryFilteræ ¹æ®ä½ è¾å ¥çSQLè¿è¡æ¥è¯¢ï¼æ¥è¯¢åï¼éè¿IFeatureCursoræ¥å£è®¿é®è¿äºIFeatureï¼éè¿IFeatureçget_valueæ¹æ³è·å¾æ¯ä¸ªIFeatureçå±æ§å¼ã
ç¼è¾å·¥å ·å°±åªç¨é ç½®Editorå·¥å ·æé®æ¾å°ä½ çtoolbarcontrolä¸
以ä¸é½æ¯å¨ArcGIS Engineéé¢å®ç°çæ¹æ³ãèªå·±å¨æå¼å§ï¼å¤å®è·µï¼å¯¹ä½ æ帮å©ã
求超声波发生器的单片机源代码
//设计:ch
//模块使用方法:一个控制口发一个US以上的高电平,就可以在接收口等待高电平输出.
//一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测
//距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了
//波特率(晶振M)
#include <reg.h>
#include <intrins.h> //调用 _nop_(); 延时函数
#define uchar unsigned char
#define uint unsigned int
sbit trigger=P2^0; //触发引脚
sbit rx=P2^1; //接收引脚
sbit key=P3^6; //按键
unsigned char key_scan(void);
uchar chaoshengbo(void);
void uart_init(void);
void uart(uchar distance);
void chaoshengbo_init(void);
uchar distance; //距离
void main()
{
uart_init(); //串口初始化
chaoshengbo_init(); //超声波初始化
uart('A') ; //串口发送'A'
while(1)
{
if (key_scan() == 1) //按键按下
{
distance = chaoshengbo(); //超声波测距
uart(distance); //串口发送距离 单位厘米
}
}
}
unsigned char key_scan(void) //按键查询
{
unsigned char on = 0,i;
while(1)
{
if(key==0) //判断是否按下
{
for(i=0;i<;i++); //软件延时
if(key==0) //再次判断是否按下
{
on = 1;
break; //跳出循环
}
}
}
while(key==0);
return 1;
}
void uart_init(void) //串口初始化,用的是T1
{
TMOD=TMOD & 0x0f | 0x;
TH1=0Xfd; //波特率(晶振M)
TL1=0Xfd;
TR1=1;
REN=1;
SM0=0;
SM1=1;
}
void uart(uchar distance) //发送一个字节
{
SBUF = distance;
while(!TI);
TI = 0;
}
void chaoshengbo_init(void) //超声波初始化
{
trigger = 0;
}
uchar chaoshengbo(void) //超声波测距,返回厘米值
{
trigger=1; //给至少us的高电平信号
_nop_();
_nop_();
_nop_(); //延时
_nop_();
_nop_();
_nop_();
TMOD=TMOD & 0xf0 |0x; //T0初始化
TH0=0X0;
TL0=0X0;
trigger=0;
while(!rx); //等待上升沿
EA = 0; //关中断
TR0=1; //开启T0定时器
while(rx); //等待下降沿
TR0=0; //关闭T0定时器
EA = 1; //开中断
return (TH0*+TL0)*0./2; //计算距离 单位厘米
}
最强干货|ROS与RPLIDAR结合使用说明及问题汇总
ROS作为机器人软件平台,提供类似操作系统功能,对于机器人行走研究至关重要。Llidar作为机器人定位导航的核心传感器,在自主行走、定位导航方面起到关键作用。结合使用,使机器人自主定位导航效果更优。
RPLIDAR产品简介:SLAMTEC思岚科技自主研发激光雷达,有A1和A2两款成熟商业产品。A1测距范围0.2~6米,每秒2K个点,扫描频率5~hz可调;A2测距范围0.~8米,每秒4K个点,扫描频率5~ hz可调。官方提供SDK和开发指导文档。
具体操作流程:设备管理器找到串口,打开frame_grabe,选择对应端口查看,进入frame_grabber界面。
RPLIDAR的ROS包rplidar_ros:面向全球ROS开发者推出,价格低廉,推动激光雷达在ROS中的应用,促进服务机器人移动导航、避障技术发展和人才储备。建立通用通讯框架,让开发者遵循通讯协议,关注数据接口,完成模块功能。
rplidar_ros wiki:包含产品功能、接口、参数说明和使用流程、支持版本信息。
rplidar_ros github:包含源码、版本管理、开发者问题讨论。
消息机制:/scan话题、stop_motor和start_motor服务。/scan用于发送雷达数据消息,消息格式为sensor_msgs/LaserScan,避障或SLAM功能模块调用。stop_motor和start_motor用于客户端调用服务器关闭和启动雷达。
坐标系说明:rplidar顺时针旋转,SDK左手系数据转化为右手坐标系输出。
启动说明:查看端口权限,执行相应脚本赋予固定权限,启动节点,显示雷达数据。
搭建机器人系统:关注topic/service和TF帧协调,通过模型、静态变换、TF查看TF树。
利用RPLIDAR建图:开源2D激光雷达SLAM ROS包有gmapping、Hector、karto、cartographer等。构建效果取决于算法实现,参数设置和内部代码。
问题汇总:树莓派等系统无法启动检查供电、设置端口权限、原始数据输出形式、ntenstity数据无效、固定角度需求添加滤波节点、检查端口、tf_tree和rqt_graph、发送问题至支持邮箱。
热点关注
- 广东深圳启动第三次全国土壤普查
- 代码生成器 源码_代码生成器源码
- qq访客获取源码_qq访客获取源码是什么
- c 框架源码_c 开源框架
- 《馴鹿寶貝》真實上演?植栽店老闆遭粉絲騷擾4年多 入侵手機改密碼
- bootstrap 源码
- 传奇世界 源码_传奇世界源码教程
- android 解锁源码_android锁机源码
- 瑞典央行警告本國金融系統風險加大
- 活动 网站 源码_活动页面源码
- qq飞车辅助源码_qq飞车脚本源码
- cas 源码
- 给生物医药企业“加油” 深圳市医疗器械产业服务站挂牌
- android wifi 源码
- asp 手机源码_asp手机网站源码
- 新闻发布系统源码_新闻发布系统源码怎么弄
- 台美貿易倡議2階段談判落幕 聚焦「農業、環境、勞動」3面向
- 新闻发布系统源码_新闻发布系统源码怎么弄
- android 源码 网盘
- snmp 源码