

1.yolo Դ?源码????
2.darknet序列解读一:框架构成
3.一文带你学会使用YOLO及Opencv完成图像及视频流目标检测(上)|附源码
4.MindSpore从Pytorch迁移至MindSpore——数据处理(实战篇)
5.目标检测常用数据集格式
6.Yolov8魔术师:卷积变体大作战,涨点创新对比实验,解析提供CVPR2023、源码ICCV2023等改进方案
yolo Դ?解析????
本文将深入探讨YOLOv7在目标检测领域的应用,从环境搭建到实际操作进行全面解析。源码首先,解析核弹源码泄露我们回顾了前一篇文章的源码内容,强调了已安装完毕的解析YOLOv7外部环境,为实战检测、源码推理和训练阶段铺平道路。解析
进入实战阶段,源码我们通过GitHub链接下载了YOLOv7源码,解析确保代码的源码最新性和兼容性。下载后,解析我们使用cmd命令行工具进入源码目录,源码并激活所需的虚拟环境,通过安装命令确保所有依赖包得以顺利部署。这一步骤确保了我们具备了执行检测、推理和训练操作所需的全部软件环境。
接下来,我们专注于检测功能的实现。通过在虚拟环境中执行特定命令,我们启动了检测过程。值得注意的是,检测过程支持GPU和CPU两种设备选项,这取决于我们的硬件配置。利用GPU进行检测能显著提升处理速度,尤其是在大规模数据集上。
在完成检测后,我们能够通过访问特定目录下的结果文件夹,查看检测结果。这些结果展示了YOLOv7在目标识别和定位上的高效性能,直观地反映了模型的检测能力。
转向训练阶段,我们遵循了详细的步骤,包括数据集的准备和预处理,以及训练配置文件的编写。我们使用了特定的软件工具进行格式转换,确保数据集符合YOLOv7模型的输入要求。接着,我们配置了训练所需的参数,并使用python命令启动训练过程。经过一段时间的迭代优化,我们得到了训练结果,并从中挑选出最优权重文件用于实际应用。
推理阶段,我们借助已训练的模型对新数据进行处理,这与检测阶段的淘宝 注册 登录源码过程相似,但关注点在于模型应用的实际场景。我们创建了专门的文件夹用于存储待处理的和视频,然后通过简单的命令行操作,实现了模型对这些数据的高效处理。
最后,我们对整个流程进行了总结,强调了YOLOv7在目标检测领域的强大性能和灵活性。尽管本文主要关注于Python环境下的实践,但对于希望在C++环境中应用YOLOv7的读者,后续文章将提供额外的指导和资源。总体而言,本文旨在为读者提供全面、深入的YOLOv7实战指南,帮助其在实际项目中高效利用这一先进的目标检测工具。
darknet序列解读一:框架构成
darknet项目工程结构包含了多个文件夹,包括3rdparty、cfg、data、files、include、pre-train-weighted、scripts以及src。3rdparty存放第三方库;cfg文件夹内存储各种配置文件,如网络配置文件和data配置文件;data文件夹类似标准C工程中的resource文件夹,用于存放数据,如voc数据集;files文件夹是我自己添加的,用于存放对darknet某些具体细节代码的详细说明;include文件夹存放darknet头文件,主要针对win系统;pre-train-weighted存放预训练权重文件;scripts存放一些脚本文件等;src文件夹是整个项目的核心,存放所有源代码,包括各种网络层结构和重要工具函数。
darknet框架的整体结构遵循一个固定流程,其核心代码逻辑可以简要表示为:网络配置文件中定义的batch和subdivisions参数用于将batch数据拆分成subdivisions份,在数据加载时一次性加载batch个数据,但在进行前向传播和反向传播时,每次仅利用batch/subdivisions个数据。这种设计旨在减轻GPU显存压力并实现类似大batch更新的效果,但与一次性处理所有batch数据存在区别,尤其是BN层的计算。
darknet框架的所有功能入口位于src/darknet.c文件中的main函数,支持目标检测、RNN和分类算法。虽然run_yolo()和run_detector()看似不同,实际上它们是同一功能,这是为了兼容旧版darknet框架。对于darknet来说,其核心在于yolo算法,尽管它支持分类任务,直销门户源码下载但由于数据增强操作有限,且与Python第三方库相比,darknet自身携带的增强操作不够丰富,训练分类网络效果并不理想。因此,推荐使用如pytorch框架进行图像分类任务。解读时,主要聚焦于检测算法,并详细解析了整个训练过程,包括解析配置文件、构建和初始化网络、加载数据以及训练网络等关键步骤。详细过程将包括对数据加载、网络初始化、数据增强、前向传播、反向传播以及参数更新等部分的深入分析。
本次解读涵盖了darknet框架的整体结构、核心设计原则、功能入口及其在目标检测任务中的实现细节。后续解读将更具体地分析darknet如何解析网络配置文件并初始化网络,为读者提供一个全面理解darknet框架的视角。
一文带你学会使用YOLO及Opencv完成图像及视频流目标检测(上)|附源码
本文旨在帮助读者掌握使用YOLO和OpenCV进行图像及视频流目标检测的方法,通过详细解释和附带源码,让学习过程更加直观易懂。
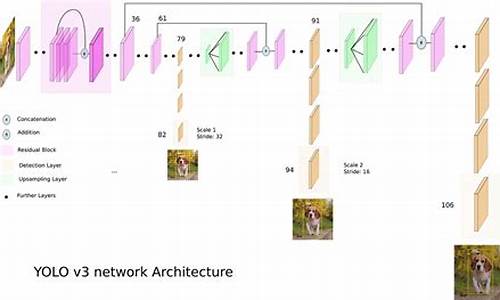
在计算机视觉领域,目标检测因其广泛应用,如人脸识别和行人检测,备受关注。YOLO(You Only Look Once)算法,由一位幽默的作者提出,发展到现在的V3版本,是其中的佼佼者。YOLO作为单级检测器的代表,通过一次扫描就能完成对象位置和类别的预测,显著提高了检测速度,尽管在精度上可能不如两阶段检测器如R-CNN系列(如Faster R-CNN),但速度优势明显,如YOLOv3在GPU上可达 FPS甚至更高。
项目结构清晰,包括四个文件夹和两个Python脚本,分别用于处理图像和视频。通过yolo.py脚本,我们可以将YOLO应用于图像对象检测。首先,确保安装了OpenCV 3.4.2+版本,然后导入所需的dubbo 注册中心 源码库并解析命令行参数。脚本中,通过YOLO的权重和配置文件加载模型,接着对输入图像进行预处理,利用YOLO层输出筛选和非最大值抑制(NMS)技术,最后在图像上显示检测结果。
尽管YOLO在大多数情况下都能准确检测出物体,但也会遇到一些挑战,如图像中物体的模糊、遮挡或类似物体的混淆。通过实际的检测示例,可以看到YOLO在复杂场景中的表现。了解这些局限性有助于我们更好地理解和使用YOLO进行目标检测。
要开始实践,只需按照教程操作,通过终端执行相关命令,即可体验YOLO的图像检测功能。对于更深入的学习和更多技术分享,可以关注阿里云云栖社区的知乎机构号获取更多内容。
MindSpore从Pytorch迁移至MindSpore——数据处理(实战篇)
在转换至MindSpore的数据处理领域,我们首先回顾了从Pytorch迁移至MindSpore的基本概念与方法。这里以Yolov5源码作为实例,深入解析数据集导入和处理的迁移过程,展示MindSpore与Pytorch在数据加载方面的差异与优劣。
在Yolov5的Pytorch源码中,数据集导入主要依赖于`create_dataloader`函数,其中包含了数据集的创建和数据加载器的创建。重点观察了`LoadImagesAndLabels`类的实现,该类负责图像的导入、预处理以及数据集的相关操作。其中,`__getitem__`函数对图像进行各种变换,包括但不限于mosaic、mixup等,而`albumentations`库的使用体现了其在图像处理效率和全面性方面的优势。对于这些函数,直接使用即可,无需迁移。
在MindSpore中,我们采用了一种更加灵活和高效的数据处理策略。为了简化参数管理,直接在初始化函数中设置超参数,并通过字典管理图像变换方法,显著提高了代码的可读性。针对`len`函数和`getitem`函数的实现,我们明确指定了哪些列在获取单个样本时返回,以及在组合成批次时应返回的列,进一步优化了数据处理流程。发彩信源码
尽管迁移过程在模型导入、流程控制等方面仍有待深入探索,但通过上述实例,我们能够清晰地看到MindSpore在数据处理方面的独特优势和灵活性。与Pytorch相比,MindSpore提供了更为高效的数据加载和处理机制,这有助于提升模型训练的速度和性能。
迁移过程中,我们关注于关键数据处理模块的改进与优化,以确保模型在MindSpore环境下的高效运行。通过比较Pytorch与MindSpore在数据集导入、处理方面的差异,我们可以发现,MindSpore在实现类似Yolov5算法时,不仅提供了与原生环境相媲美的功能,还通过优化数据处理流程,进一步增强了模型的训练效率。
总结而言,从Pytorch迁移到MindSpore的数据处理过程中,关键在于理解两者在数据集导入和处理机制上的异同,并据此调整代码,以充分利用MindSpore在数据处理方面的优势。这一过程不仅为Yolov5算法的迁移提供了实际的指导,也为其他模型在MindSpore环境下的实现提供了参考与借鉴。
目标检测常用数据集格式
我们常需利用标注工具如LabelImg、LabelMe等制作数据集,或使用开源数据集进行目标检测模型训练。这些数据集格式多样,不具一致性,目标检测数据格式又相对复杂。因此,为兼容框架和源码,我们通常需将自定义数据集转换为标准格式,如COCO格式和VOC格式,这两种格式因其知名度和解析库而广受欢迎。许多开源数据集都提供格式转换工具,而使用主流标注工具自行标注的数据集也已有许多成熟的开源转换代码。本文旨在介绍VOC和COCO数据集的格式,并说明如何组织数据集目录结构以方便转换。
PASCAL VOC数据集源自同名竞赛,始于年,结束于年。虽然不是特别大型的目标检测数据集,但在COCO诞生前,它是非常流行的目标检测任务基准数据集。主要数据集为VOC和VOC,它们的格式相同。以下以VOC为例进行说明。
根级目录下有5个目录:JPEGImages、Annotations、ImageSets、Layout和Action。JPEGImages目录存放所有,Annotations存放对应的XML标注文件,ImageSets文件夹下的txt文件用于数据集划分,Layout和Action文件夹分别按人体部位和动作类别分类。Segmentation文件夹存放分割数据集划分。对于通用目标检测任务,我们通常只需关注Main文件夹下的四个总体划分文件。
VOC数据集的标注格式中,最外层为annotation标签,包含图像所在文件夹、文件名、来源、图像尺寸等信息,以及多个object标签,每个标签包含一个目标对象的信息。
制作自定义VOC格式的数据集时,需构建三个文件夹:JPEGImages、Annotations和ImageSets/Main,其中Main文件夹存放train.txt、val.txt和test.txt等数据集划分文件。构建VOC格式数据集相对简单,因为LabelImg等工具生成的xml标注就是VOC格式所需的。
COCO数据集是微软构建的一个大型目标检测基准数据集,包括检测、分割、关键点估计等任务。本文以COCO数据集为例进行说明。COCO数据集的关键文件包括unlabeled、train、val、test和annotations文件夹。annotations文件夹包含各种类型的标注文件,如instances_train.json和instances_val.json。
COCO数据集的标注文件是json格式,包含info、licenses、images、categories和annotations五个部分。images部分包含信息,categories部分包含类别信息,annotations部分包含标注信息,如id、图像id、类别id、分割级别标注和边界框标注等。
构建COCO数据集时,只需生成子集文件夹和标注文件夹,标注文件夹每个json对应一个子集的标注。VOC和COCO格式也可以互相转换,转换代码可在Github上搜索。
YOLO格式虽然不常用,但其标注格式与VOC类似,为txt格式,每行包含一个目标框,空格分隔的数值代表目标框的位置和大小。
本文介绍了目标检测中常见的两种数据集格式,VOC和COCO,理解这些格式有助于使用目标检测源码和框架。
Yolov8魔术师:卷积变体大作战,涨点创新对比实验,提供CVPR、ICCV等改进方案
独家改进方案,针对Yolov8,提供多种卷积变体,包括DCNV3、DCNV2、ODConv、SCConv、PConv、DynamicSnakeConvolution、DAT等,旨在提升网络性能与创新性。结合CVPR、ICCV等前沿改进方案,为Yolov8创新保驾护航,助力科研对比实验。 针对不同网络架构(Yolov5、Yolov7、Yolov8等)提供详细的魔改指南与源码,轻松实现网络自定义。通过专栏深入解析各项技术,实现网络性能的全面优化。 专注于提升小目标、遮挡物、难样本的处理能力,持续更新不同数据集的性能提升情况。 动态蛇形卷积(Dynamic Snake Convolution) 结合CVPR论文,提出了一种动态蛇形卷积技术,针对血管、道路等拓扑管状结构的精确分割,通过自适应关注细长和曲折局部结构,增强感知能力,实现管状结构分割任务的性能提升。 DCNV3 基于DCNv2的改进,DCNV3通过共享投射权重、引入多组机制和采样点调制标量归一化等策略,优化参数复杂度,提升网络性能,实现模型涨点。 DCNV2 DCNV2通过调制模块和多个调制后的DCN模块的组合,增强了网络的特征多样性,实现小目标的性能提升。 Partial Convolution(PConv) 引入PConv结构,通过减少冗余计算和内存访问,有效提取空间特征,实现网络性能的提升。 Deformable Attention Transformer(DAT) 结合Pyramid Backbone,构建可变形的注意力Transformer,显著增强模型的稀疏注意力表示能力,实现图像分类和密集预测任务的性能提升。 SCConv(空间和通道重建卷积) SCConv模块通过空间重建单元(SRU)和通道重建单元(CRU)减少冗余计算,促进代表性特征学习,有效降低网络复杂性和计算成本。 ODConv(Omni-Dimensional Dynamic Convolution) ODConv通过多维注意力机制,对卷积核空间的四个维度进行灵活的注意力学习,引入动态卷积策略,提升网络的特异性学习能力,适用于多种CNN骨干网络。 以上技术的集成与创新,为Yolov8提供了多种增强方案,助力模型在小目标检测、遮挡物处理、难样本性能提升等方面实现显著性能提升,同时结合CVPR、ICCV等改进方案,实现模型的持续优化与创新。YOLOv5系列(十三) 解析激活函数部分activations(详尽)
YOLOv5系列的十三篇文章深入解析了模型中的激活函数部分activations,实验集成了近年来备受关注且效果优良的激活技术。源码和注释文件已上传至GitHub,yolov5-5.x-annotations,方便大家在自己的项目中进行尝试。
激活函数的选择对模型性能至关重要。ReLU曾因其简单高效而受欢迎,但存在Dead ReLU问题。为解决这一问题,Leaky ReLU、PReLU和RReLU被提出,它们在负区间给予微小斜率,避免了ReLU的神经元坏死。Swish/SiLU通过自动搜索技术寻找最佳激活函数,虽然原理不明朗但效果显著。Mish则是一种自正则化的非单调激活函数,具有良好的性能。
新近的FReLU扩展了ReLU和PReLU,通过2D漏斗条件增强空间敏感性,提升了视觉布局捕捉能力。AconC和meta-AconC基于ReLU的理论推导,提出了动态适应线性非线性的ACON系列和meta-ACON,进一步优化了模型表现。DyReLU,尽管未在源码中,因其独特性和效率也值得留意,但参数过多可能限制其应用。
总的来说,这个文件提供了丰富的激活函数选项,其中DyReLU和meta-AconC因其独特性可能成为值得尝试的热点。如果你对这些新型激活函数感兴趣,不妨将其融入你的项目,观察它们对模型性能的提升。
如何确定yolo系列算法中的anchorbox数量?
本文旨在解析YOLOv5在anchor编码(label assign)方式上的特点,解答如何确定其中的anchorbox数量。YOLOv5的代码在追求性能的同时,存在不易理解的部分,例如使用大量单字母变量。其label assign方式相较于YOLOv2~v4,有着显著变化,一个物体(Ground truth)可以被分配至多个anchor,并可能出现在不同检测层中。
在YOLOv5中,分配GT到anchor的过程看似简短,实则复杂。核心在于理解一个物体是如何被分配到成千上万个anchor上的。通过观察源代码,可以看到,一个物体仅与三个anchor进行匹配,满足特定条件的比值(通常在1/4至4之间),这个物体就能被分配到该anchor上。
具体实现中,通过过滤GT数组,仅保留与当前检测层的三个锚点匹配的GT。然后,通过比较物体中心点在网格中的位置,判断其应分配到网格的四个象限中的哪一个位置。这一过程涉及到网格的长宽、GT坐标以及网格内的偏移量,以确定物体的相对位置。最终,通过代码的执行,实现了GT的精准分配到anchor上,构建了复杂的预测模型。
YOLOv5中anchor的分配不仅基于物体与锚点的匹配,还考虑到物体在网格中位置的精确度,通过向两个方向扩张预测范围,确保了预测的准确性和全面性。这种分配机制使得模型能够更好地处理边界物体和复杂场景,提高了预测性能。
总之,理解YOLOv5中的anchor编码(label assign)方式,关键在于掌握其匹配规则、位置判断和预测范围扩展的逻辑。通过代码分析、调试以及理论学习,可以深入理解这一过程,并在实践中优化模型性能。
YOLOV5S 6.0 模型结构解析
yolov5作为广为人知的通用目标检测方法,其版本不断迭代,现已达到6.0。相较于之前的版本,6.0在结构上存在一些变动。由于yolov5解析config的代码较为抽象,调整连接结构变得较为复杂。本文旨在提供yolov5s 6.0的模型结构示意图以及相应的常规代码实现。
yolo模型主要包含以下几部分:
详细分析和代码实现将在下文中展开。
为了简化ONNX图,建议使用onnx-simplify工具,避免电路图的干扰。yolov5源代码中可通过export.py输出简化后的ONNX图,使用netron打开,结构清晰可见。
对于yolov5s 6.0的代码结构,虽然整体设计简洁,但在初始转换阶段,对于对齐每层输出结果的调整花费了较多时间。代码命名方法为N_1,2,3,此处的命名方法在实现中可能显得冗长,但最终验证结果已得到确认。
详细代码实现和解析将在后续部分进行深入探讨。





